現在 PixyPet の先導車用に, ラジコンZumoを XBee, VS-C1, BLEserial3 の3台(赤外線はXBeeにアップデート)で運用していますが, 赤青のボール2台ずつ先導させるにはもう1台ほしいところ. TimerCAM を使ったマリオカートライブもどきの 試作4号機 を出せば4台運用可能ですが, こいつは PixyPet の翌週に登場させる機体なので,ネタバレになっちゃう~ ということで,4台目として ESP-Now を使った無線コントロールを考えてみました.
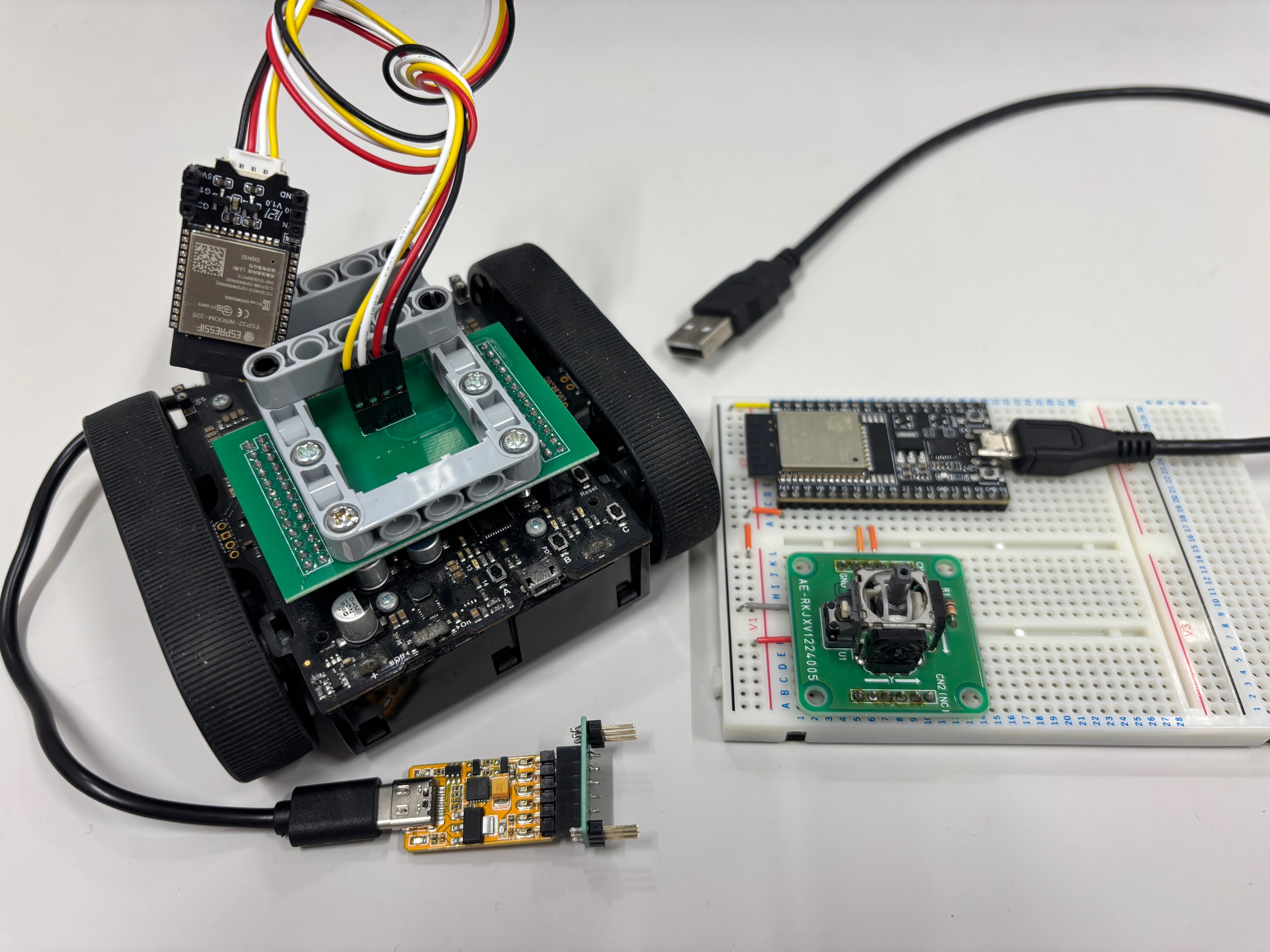
使用する ESP32 は,マリオカートライブもどきの 試作1号機 で使用した ESP32開発キットと, 試作2号機 でカメラだけ壊れた UNIT-CAM を使いました.使わなくなった資材の有効活用ですね! UNIT-CAM は GROVE 端子を持っているので,Zumoとの接続は試作後の量産基板(参考画像は こちら のあとがき参照)が流用できます. 必然的に後者が受信側となり,前者をコントローラ側にしました.
試作4号機 (本番)で使っている Dabble アプリをうまくエミュレートできれば
Zumo 側のプログラムをそのまま流用できるはず!というコンセプトで書きました.
注意点として,プログラム内で MAC アドレスを決め打ちして接続しに行く都合上,受信側ESP32の MAC アドレスを事前に調べておいてください.
同じ Gitリポジトリ内 の M5mario_OV3660_iPad.ino となるべく同じデータを送るようにしています.
こんな小さなマイコンで三角関数が使えるんですね.すごい時代だww
こちらは ESP-Now で受信したバイトデータをそのまま I2C に垂れ流すだけのプログラムです. 送信側同様に M5mario_OV3660_iPad.ino と同じです.
ESP-Now ではじめて通信させましたが良好でした.簡単ですね~ 動作動画は省略します.
唯一の難点として,このコードは esp32 ライブラリのバージョン 3.3.3 で書いたので,
試作4号機 の M5mario_OV3660_iPad.ino とは違う環境でコンパイルする必要があります.
2.x 系に合わせて書こうかと悩みましたがいまさら古いコードで書くのもどうかと思い,執筆時点での 3.x 系をベースにコードを書きました.
ワタシのところでは,デスクトップPCを 2.0.3 に,サブノートを 3.3.3 にして,それぞれで書き込んでいます.
デモ機用に保管しておけばそうそう書き直すこともないので.